 |
| Weighing in at just over a pound. |
 |
| Yes it is made of wood. |
About Melty Brain Robots
Melty brain robots, or translational drift robots work by using the drive motors to spin the entire robot. Using sensors to keep track of the robot's orientation at all times, it can selectively slow down a motor at the same time every rotation to "drift" in a direction. Examples of other melty brain robots are Spinning Tortoise and MeltyB.
The great thing about meltys is that the entire robot's mass goes into the weapon, giving it plenty of inertia. The difficult things about them is:
- Without some kind of sensing, they are basically uncontrollable
- Everything on the robot needs to be shock mounted
The end result of the sensors is figuring out what direction the robot is facing at any given instant. There are two general ideas I can come up with. Beacon based, where the robot tracks a stationary object, and inertial based, where inertial sensors tell it the rate of rotation.
The benefits of a beacon system is that it provides an absolute reference on the heading of the robot. Since the beacon is stationary, more assumptions can be made making orientation tracking much easier. The downside is that a beacon system must be chosen. Visible light/infrared systems work as long as there is clear line of sight to the transmitter, and require filtering to eliminate noise. RF based systems would have less a problem with obstructions, and more with noise. Apparently, a system like that approaches radar complexity.
The other method, inertial sensing, allows the robot to be entirely self contained. Rotational velocity can be measured either directly with a gyroscope or indirectly through centripetal acceleration and an accelerometer. Accelerometers are prescaled by placing them at an angle, since in most cases they would saturate. Gyroscopes with that high rate of rotation are difficult to come by, with only the Analog Devices ADXRS649 being anywhere in the required range.
In the end, we decided in gyroscopes, due to gyroscopes requiring no outside components (less things to break), not being radar level signal processing, and less noise than accelerometers.
About Melty Brain Robots
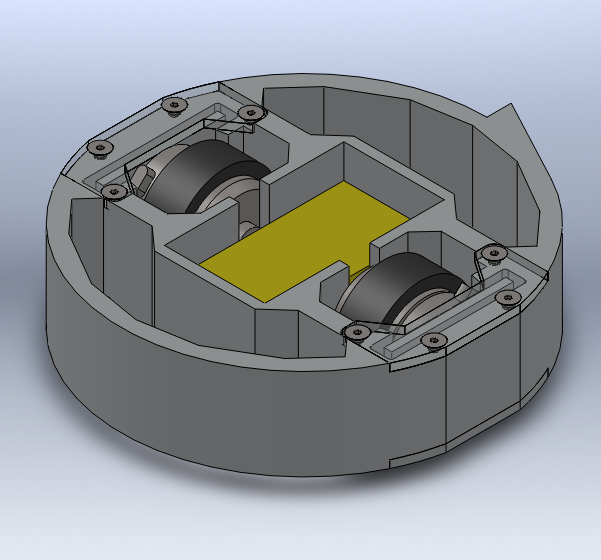
Gyro King was designed to be waterjet out of a 1.5" thick piece of 6061 aluminum plate. Everything needs to be shock mounted. The motors are not rigidly to the frame, but bolted on to plates which are placed in pockets, then wedged in place with Sorbothane to isolate them from shock. Same for the circuit boards, resting in a pocket also lined with Sorbothane, so the traces don't get bounced off.
 |
| start |
 |
| refine |
 |
| refine more |
 |
| Finalized |
 |
| 1.3 hour waterjet job |
Coming soon, details on the control board! Actual tests! Information!
 |
| Robot |