Pythagoras is a drawing delta robot. The goals for this robot was high speed and high precision pen work. OpenCV is used to vectorize images to send to the robot for sketching.
Current progress is on version 2.5. Drawing is successful and has high accuracy. The image processing program can tell the robot to either outline an image or shade it in.
Higher manipulator speed and accuracy using resolved rate path generation and Jacobians is in progress.
Potential further development includes using brushes instead of pens, a pen switcher for multiple colors, halftoning, and SVG support. More ambitious ideas include adding omniwheels on the legs so the bot can traverse large drawing areas.
Version 1
RC Servos. Easy to get working, hard to get precision.



Currently in progress. Uses stepper motors instead of servos. More difficult to get working, but they are superior in controllability, accuracy, and speed.
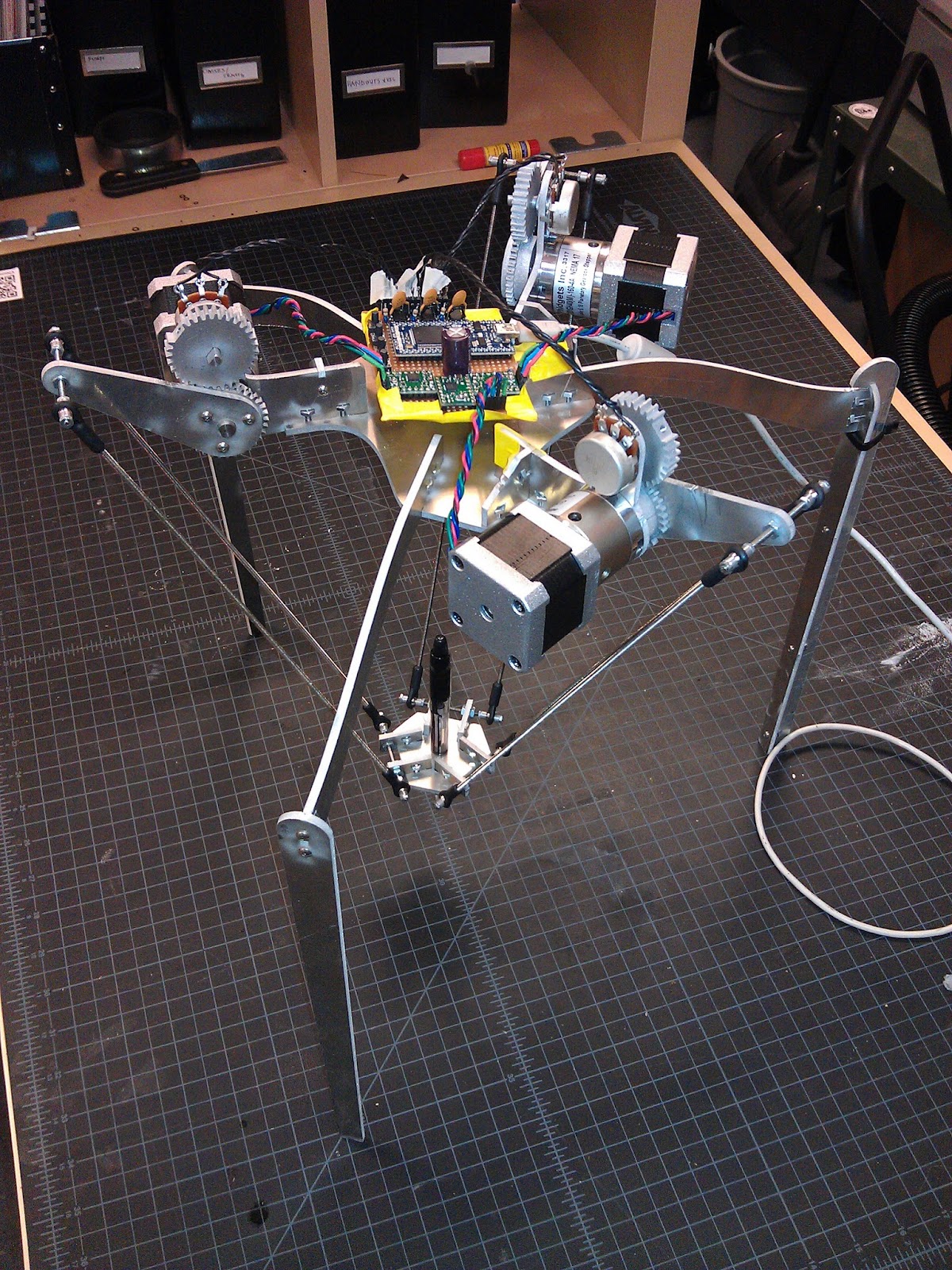



Version 2.5
Beefier legs!

Raster mode enable!



And finally, a time lapse video of a shading intensive drawing:
Stats
| Microcontroller | mbed with ARM Cortex M3 |
| Motors | Three NEMA-17 stepper motors |
| Gearboxes | Planetary 5.18:1 |
| Arm lengths | 2.75" upper arm length, 13" lower arm length |
| Resolution | At least 0.01" |
Links:
All source code, Solidworks models on github: https://github.com/aaronbot3000/deltadraw
See all posts about Pythagoras